仪表流程图的仪表位号:
仪表位号在流程图中的标注方法是:字母代号填写在仪表圆圈的上半圆中;回路编号填写在下半圆中,如下图所示:
图中(1)表示在集散系统上显示的位号为FI-111的仪表,(2)表示安装在集中仪表盘面上的位号为TRC-131的温度记录与控制仪表,(3)表示就地安装的位号为PI-121的压力表。

1、仪表位号中表示被测变量和仪表功能的字母代号如下图:
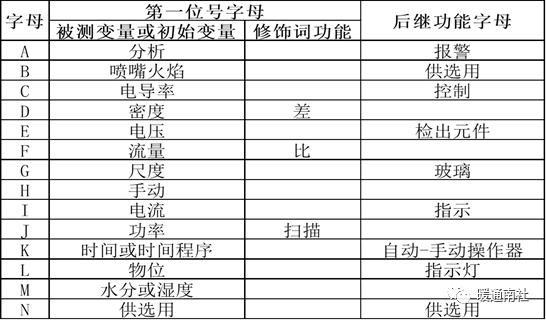
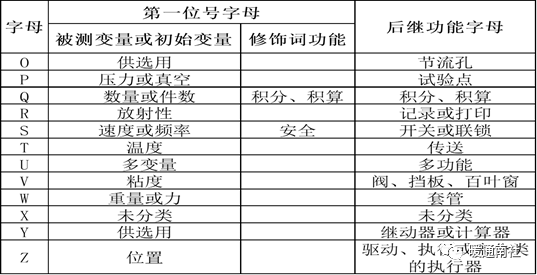
2、被测变量及仪表功能字母组合示例:

举例:AIA:分析指示、报警;TRC:温度记录、控制;PRCA:压力记录、控制、报警;FIQ:流量指示、累积;PDI:差压指示;PCR:压力调节、记录;PRC:压力记录、调节。
变量和功能以外的常用缩写词:
在仪表流程图等图纸文件上标注文字时,可用如下缩写。
|
序号 |
缩写 |
中文 |
序号 |
缩写 |
中文 |
|
1 |
A |
模拟信号 |
11 |
DIR |
正作用 |
|
2 |
AC |
交流电 |
12 |
E |
电压信号、电信号 |
|
3 |
A/D |
模拟/数字 |
13 |
EMF |
电磁流量计 |
|
4 |
A/M |
自动/手动 |
14 |
ES |
电源 |
|
5 |
AND |
与门 |
15 |
FC |
故障关 |
|
6 |
AS |
空气源 |
16 |
FF |
前馈控制方式 |
|
7 |
AVG |
平均 |
17 |
FI |
故障时任意位置 |
|
8 |
D |
微分控制、数字信号 |
18 |
FL |
故障时保位 |
|
9 |
DC |
直流电 |
19 |
FO |
故障开 |
|
10 |
DIFF |
减 |
20 |
GS |
气体源 |
|
21 |
H |
液压信号、高 |
34 |
M |
电动机执行机构、中 |
|
22 |
HH |
最高、较高 |
35 |
MAX |
最大 |
|
23 |
HS |
液压源 |
36 |
MF |
质量流量计 |
|
24 |
H/S |
高选 |
37 |
MIN |
最小 |
|
25 |
I |
电流信号、联锁、积分 |
38 |
NOR |
正常、或非门 |
|
26 |
IA |
仪表空气 |
39 |
NOT |
非门 |
|
27 |
IN |
输入、入口 |
40 |
NS |
氮源 |
|
28 |
IP |
仪表盘 |
41 |
O |
电磁、声信号 |
|
29 |
L |
低 |
42 |
ON-OFF |
通-断 |
|
30 |
LB |
就地盘 |
43 |
OPT |
最佳控制方式 |
|
31 |
LL |
最低、较低 |
44 |
OR |
或门 |
|
32 |
LS |
光源 |
45 |
OUT |
输出、出口 |
|
33 |
L/S |
低选 |
46 |
P |
气动信号、比例控制 |
|
47 |
P |
仪表盘 |
52 |
RS |
辐射源 |
|
48 |
PA |
工厂空气 |
53 |
S |
电磁执行机构 |
|
49 |
R |
复位、电阻信号 |
54 |
SP |
设定值 |
|
50 |
RAD |
无线电 |
55 |
SQRT |
平方根 |
|
51 |
REV |
反作用 |
56 |
SS |
蒸汽源 |
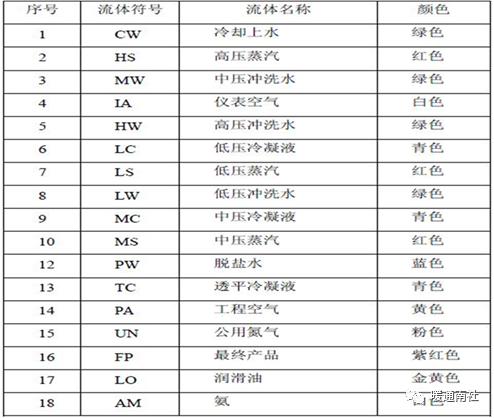
工艺管线的文字代码:
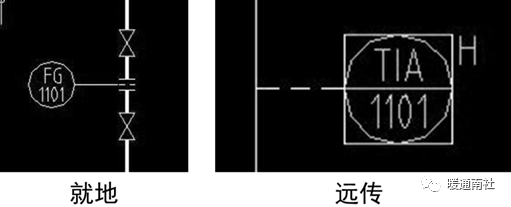
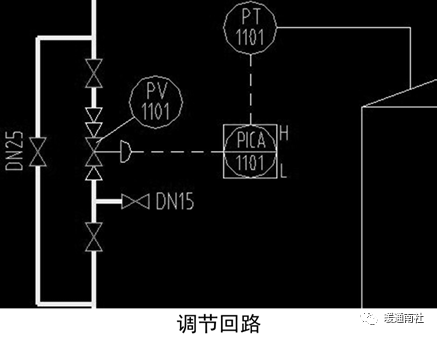
常见测控点图示:
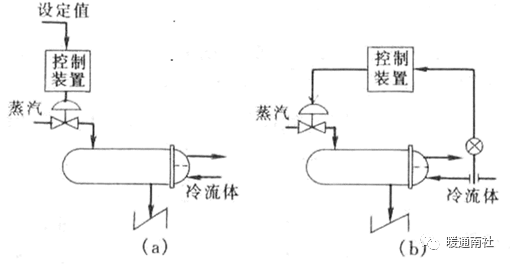
开环控制系统:
控制系统的输出信号(被控变量)不反馈到系统的输入端,因而也不对控制作用产生影响的系统称为开环控制系统。
A、按设定值进行控制,如蒸汽加热器,其蒸汽流量与设定值保持一定的函数关系,当设定值变化时,操纵变量随之变化。
B、按扰动量进行控制。在蒸汽加热器中,若负荷为主要干扰,如果使蒸汽流量与冷流体流量保持一定的函数关系,当扰动出现时,操纵变量随之变化。
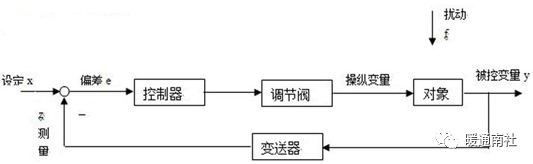
闭环控制系统:
又称反馈控制系统,系统的输出(被控变量)通过测量变送环节,又返回到系统的输入端,与给定信号比较,以偏差的形式进入控制器,对系统起控制作用,整个系统构成了一个封闭的反馈回路。
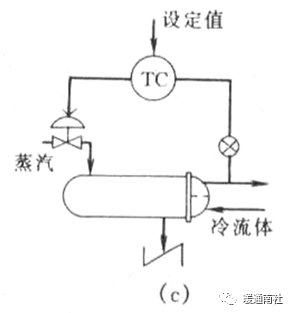
如在蒸汽加热器的出口温度控制系统中,温度控制器接受检测元件及变送器送来的测量信号,并与设定值相比较,根据偏差情况,按一定的控制规律调整蒸汽阀门的开度,以改变蒸汽量。
定值控制系统:是指这类控制系统的给定值恒定不变。
随动控制系统:也称为自动跟踪系统,这类系统的给定值是一个未知的变化量。
程序控制系统:也称顺序控制系统(简称:顺控),这类控制系统的设定值也是变化的,但它是时间的已知函数,即设定值按一定的时间程序变化。
简单控制系统:
又称单回路反馈控制系统,是指由一个被控对象、一个测量变送器、一个控制器和一只调节阀所组成的单回路闭合控制系统。
简单控制系统常用被控变量来划分,最常见的是温度、压力、流量、液位和成分等五种控制系统。
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
比例(P)控制:比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(静差)。
积分(I)控制 :在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。
微分(D)控制:在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入 “比例”项往往是不够的,比例项的作用仅是放大误差的幅值,如果增加的是“微分项”,它能预测误差变化的趋势,就能 够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。
P调节:精度要求不高的场合。
PI调节:流量、压力、液位。
PID调节:温度。
控制方案:
参数整定找最佳,从小到大顺序查;
先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大湾,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来;
动差大来波动慢。微分时间应加长;
理想曲线两个波,前高后低4比1;
一看二调多分析,调节质量不会低。
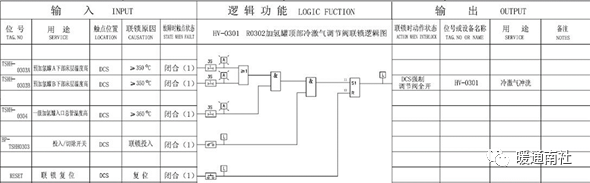
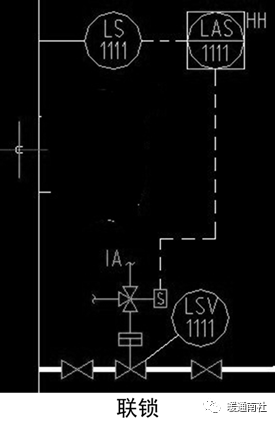
联锁:某一参数达到规定值或某一设备启、停或开、关时,联动或闭锁对另一设备的控制。